WipperSnapper Firmware Installer Updates - Beta 82

A warm hello from the Adafruit IO team!
Today we’re excited to announce the improvements to the Adafruit IO firmware installer that makes it easier than ever to get started on IO with a WipperSnapper-compatible device.
🏠 Web-based ESPTool for Native USB boards
As we add more and more sensor drivers to WipperSnapper the available flash space keeps getting lower. A few boards were even running out, leading us to need to migrate partition schemes and shrink the user file systems (where secrets are stored).
Where’s the problem there you ask? For now, the TinyUSB bootloader doesn’t support changing the partition layout by uploading a UF2. We didn’t want to force users to use Arduino, that would defeat the point of WipperSnapper’s ease of use! Instead, we have migrated these boards to use the Adafruit.io web-installer for installing and upgrading firmware.
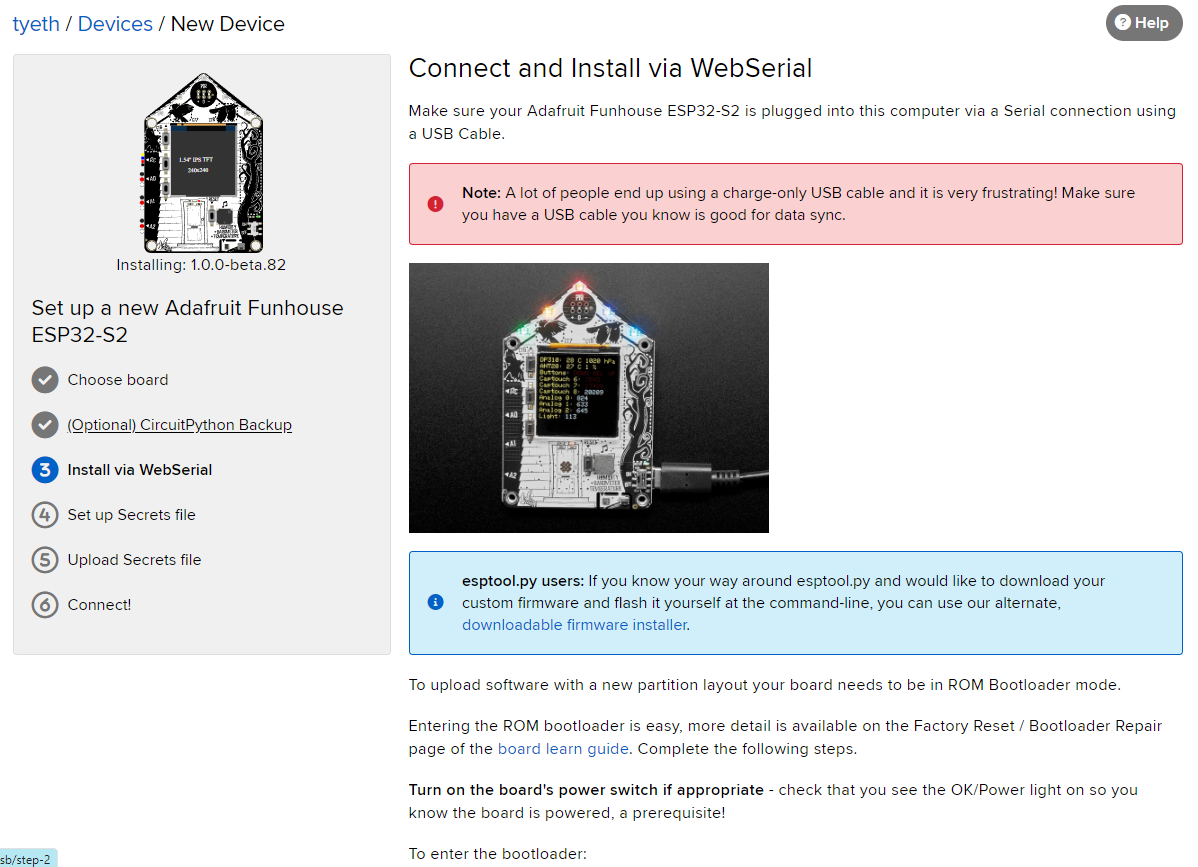
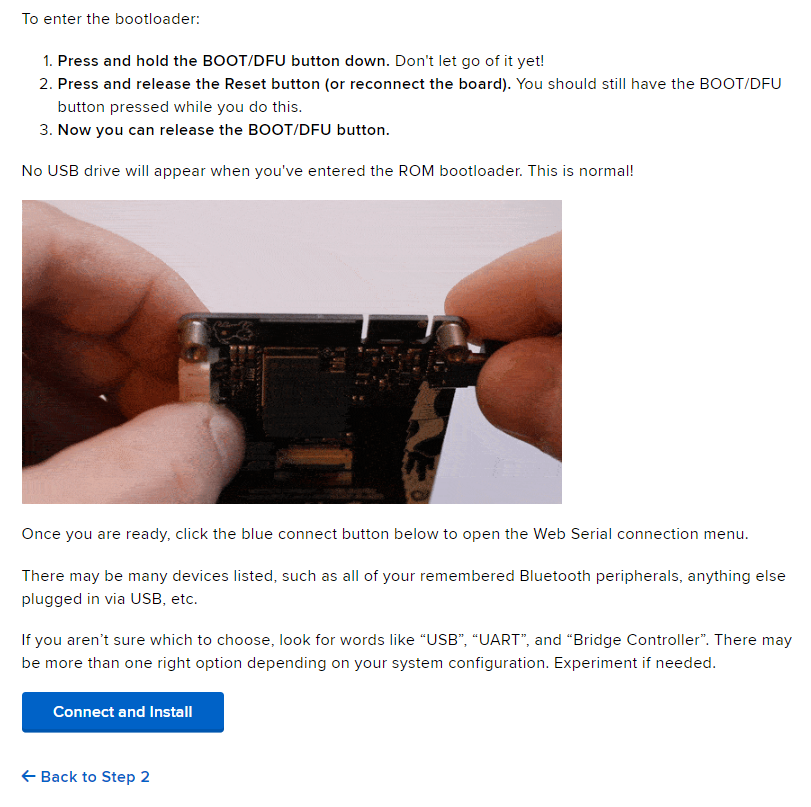
Currently the FunHouse board is the only UF2 board (with native USB support) using the new steps, but while we were at it we also updated the Feather ESP32 v1 (Huzzah32), and Qt Py ESP32-C3 to have new partition offsets too. The steps have new instructions to help put your board into bootloader mode if necessary, and the FunHouse even has a nice instructional GIF animation.
📃 Usage
To use the web installer version of esptool your browser needs to support Web-Serial (allowing it to connect to serial ports and speak to the board). This requires a chrome based browser, like Chromium, Google Chrome, or Microsoft Edge. If you can’t use the web serial method of the installer, don’t panic, we have a downloadable bin file that you can manually flash to the board using your computer and the offline official esptool.
🆕 WipperSnapper Firmware Release - Beta 82
In tandem with the IO web installer changes, we’ve released Beta 82!
Along with the changes to the aforementioned boards there are a few reliability improvements, including repeating the error message on the serial port when your board has a fatal error, and now printing any MQTT connection error reasons to help better diagnose any issues.
Lastly there are a couple of new components added, both Time-of-Flight (ToF) sensors with very high accuracy:
- VL53L1X: This is the ‘next generation’ of the VL53L0X ToF sensor and can handle about ~30 to 4000mm of range distance, with up to 50Hz update rate.
- VL53L4CD: This is another ‘big sister’ of the VL6180X ToF sensor and can handle about ~1 to 1300mm
Since both use a very narrow light source, they are good for determining distance of only the surface directly in front of it. Unlike sonars that bounce ultrasonic waves, the ‘cone’ of sensing is very narrow. Unlike IR distance sensors that try to measure the amount of light bounced, the VL53 is much more precise and doesn’t have linearity problems or ‘double imaging’ where you can’t tell if an object is very far or very close.
As always, if you have any suggestions or bugs to report about these new features, please let us know in the forums.